缓冲区管理;索引结构
缓冲区管理
- 缓冲区由一个个frame构成,每个frame刚好可以容纳一个页
- 缓冲区介于内存和磁盘之间,为计算机程序隐藏了“并非所有数据都存在内存”这一事实
Frame的参数
- Dirty
Frame中的块是否已经被修改
- Pin-count
Frame的块的已经被请求且还未释放的计数,即当前的用户数
- *Others
Latch: 是否加锁
缓冲区管理过程
- 当请求块且块不在缓冲区时:
- 选择一个用于替换的frame(空或非空)
- 如果frame是dirty的,frame的内容写回磁盘
- 将请求块写入被选择的frame
- 将该frame的pin-count自增1,且返回其地址
- 当释放块时
- 请求者将该frame的pin-count自减1
- 请求者必须声明该块是否被修改过(用frame->dirty)
缓冲区替换策略
- 理论最优:OPT算法(也称为Belady’s算法)
- 常用:LRU, LRU-K, 2Q, Second-Chance FIFO, CLOCK
LRU
- 基于时间局部性: 越是最近访问的,在未来被访问的概率越高
- 优点:
- 适用于满足时间局部性的场景(多次重复请求同一页)
- 选取frame的时间复杂度是O(1)
- 缺点:
- 缓存污染:LRU + repreated sequential scans
- 维护LRU链表代价昂贵:修改链表耗时
- 如果访问不满足时间局部性,则性能较差
- 只考虑最近一次访问,不考虑访问频率
LRU-K
- 如果某个frame的访问次数达到了K次以上,则应当尽量不置换
- 实验表明,K并非越大越好,LRU-2性能较好
- 缺点:需要额外记录访问次数
Second-Chance FIFO
- 所有frame组成FIFO链表,每个frame附加一个bit位,初始为0.当FO页第一次被选中置换为1,并移动到FI端。只有bit为1的FO页才被选中替换
- 优点:每个frame只需要1个额外bit,空间代价很低
- 缺点:置换时需要移动多个元素,理论性能比LRU差。
Q: 为什么不适用OS缓冲区管理,而需要DBMS?
A: DBMS经常能预测访问模式。可以使用更专门的缓冲区替换策略,有利于pre-fetch策略的有效使用。且DBMS需要强制写回磁盘能力,OS的缓冲写回一般通过记录写请求来实现(来自不同应用),实际的磁盘修改推迟,因此不能保证写顺序
索引结构
- 重要内容;B+树、散列表的概念;不同索引方式的优缺点对比,如时空复杂度、功能差异;多维索引的概念
- 密集索引
- 每个记录都有一个索引项
- 索引项按查找键排序
- 使用密集索引的原因:记录通常比索引项要大;索引可以常驻内存;要查找键值为K的记录是否存在,不需要访问磁盘数据块
- 缺点:索引占用太多空间 -> 用稀疏索引改进
- 稀疏索引
- 仅部分记录有索引项
- 一般情况:为每个数据块的第一个记录建立索引项
- 优点:节省了索引空间;对同样的记录,稀疏索引可以使用更少的索引项
- 缺点:对于“是否存在键值为K的记录?”,需要访问磁盘数据块
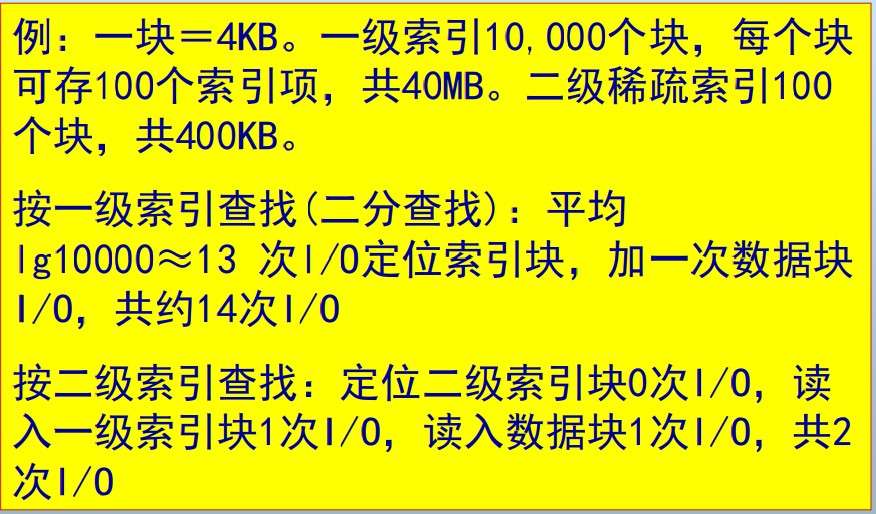
- 多级索引
- 好处:一级索引(直接指向记录)可能还太大而不能常驻内存;二级索引更小,可以常驻内存;减少磁盘IO次数
- 磁盘IO次数计算:读索引n次IO+读入数据块1次IO. 例子:
- 适用场景:当一级索引过大而二级索引可常驻内存时有效
- 缺点:二级索引进仅可用稀疏索引;一般不考虑三级以上索引(B+树更好)
- 辅助索引、倒排索引(自行查找概念)
B+树
- 一种树形多级索引结构
- 树的层数与数据大小相关,通常为3层
- 所有节点格式相同:n个值,n+1个指针
- 所有叶子节点位于同一层
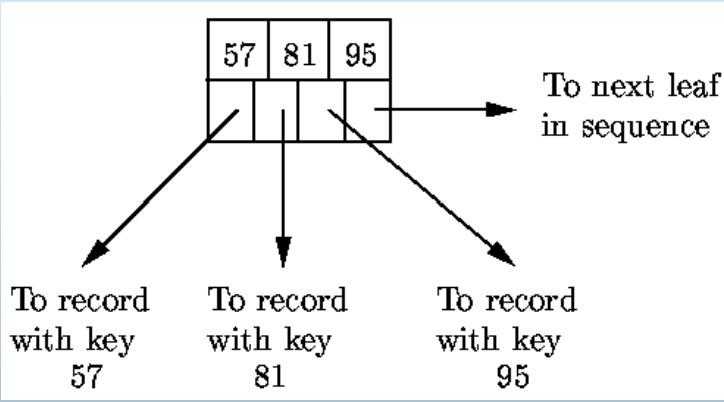
- 叶子节点:
- 个指向相邻叶节点的指针
- n对指针-键值对
- 至少
个指针指向键值
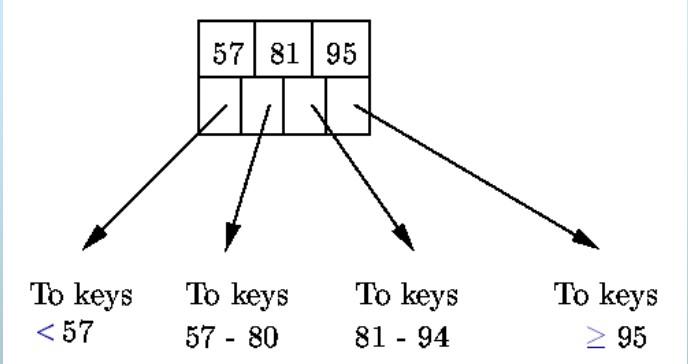
- 中间节点:
- n个键值划分n+1个子树
- 第i个键值时第i+1个子树中的最小键值
- 至少
个指针指向子树 - 根节点至少2个指针
B+树的增删改查:自查资料
B+树的特点
- 结构稳定
- 支持范围查询(键的组织基于比较)
- b+树更新索引代价高;额外空间代价高(因为是多维索引)
- 访问索引的IO代价=树高(B+树不常驻内存)或者0(常驻内存)
- 树高通常不超过3层,因此索引IO代价不超过3(总代价不超过4). 通常情况下,根节点常驻内存,因此索引IO代价不超过2(总代价不超过3)
- 例子:设块大小8KB,键2 Bytes,指针2 Bytes,则一个块可以放2048个索引项.

散列表
- 散列函数
- h: 查找键(散列键)-> [0,…,B-1]
- 桶:序号为0,1,…,B-1
- 散列索引流程
- 若一个桶中仅一块,则IO次数=1
- 否则由参数B决定,平均IO次数=总块数/B
可扩展散列表
- 定义自查. 这里只总结优缺点
- 优点:大部分情况下不存在溢出块,因此当查找溢出块时,只需要查找一个存储块
- 缺点:桶增长速度快,可能导致内存放不下整个桶数组,影响其他保存在主存中的数据,波动较大
线性散列表
- 定义自查. 这里只总结优缺点
- 优点:空间效率优于可扩展散列表;综合性能较好
- 缺点:查找性能比可扩展散列表差
B+树与散列表对比
| 特征\索引结构 | B+树 | 散列表 |
|---|---|---|
| 结构稳定性 | 稳定 | 不稳定 |
| 范围查询 | 支持(基于序关系) | 不支持 |
| 查找IO代价 | 有n层节点在磁盘中则代价为n+1 | 平均IO次数=总块数/桶数 |
| 额外空间代价 | 高(多级索引) | 低 |
| 更新索引(增、删)代价 | 高(多级索引且涉及节点的分裂合并) | 低 |
多维索引
- 空间数据
- Point
- Line
- Polygon
- 用于决策分析的多维数据
- 数据——关系
- 维——关系的每个属性
- 多维查询
- 同时在数据的多个维度上进行匹配
- 传统的索引只能索引一维,不适于多维数据处理
- 经典例子:R-Tree